2026 CES深度解析:英伟达Vera Rubin与物理AI —— 重新定义具身智能的基础设施
英伟达在 CES 2026 提出的“物理 AI”战略具体指什么?
英伟达的“物理 AI(Physical AI)”战略是其从数字世界向实体世界扩张的里程碑式转型,旨在解决 Sim-to-Real(仿真到现实) 的落地难题。
该战略基于一套严密的闭环架构:
1. 云端大脑:由 Vera Rubin 超算平台(NVLink 6, 3600 GB/s)负责训练世界模型;
2. 仿真环境:利用 Omniverse 进行基于物理定律的数字孪生验证;
3. 边缘躯体:搭载 Jetson T4000(1200 TOPS, Blackwell 架构)作为执行单元。
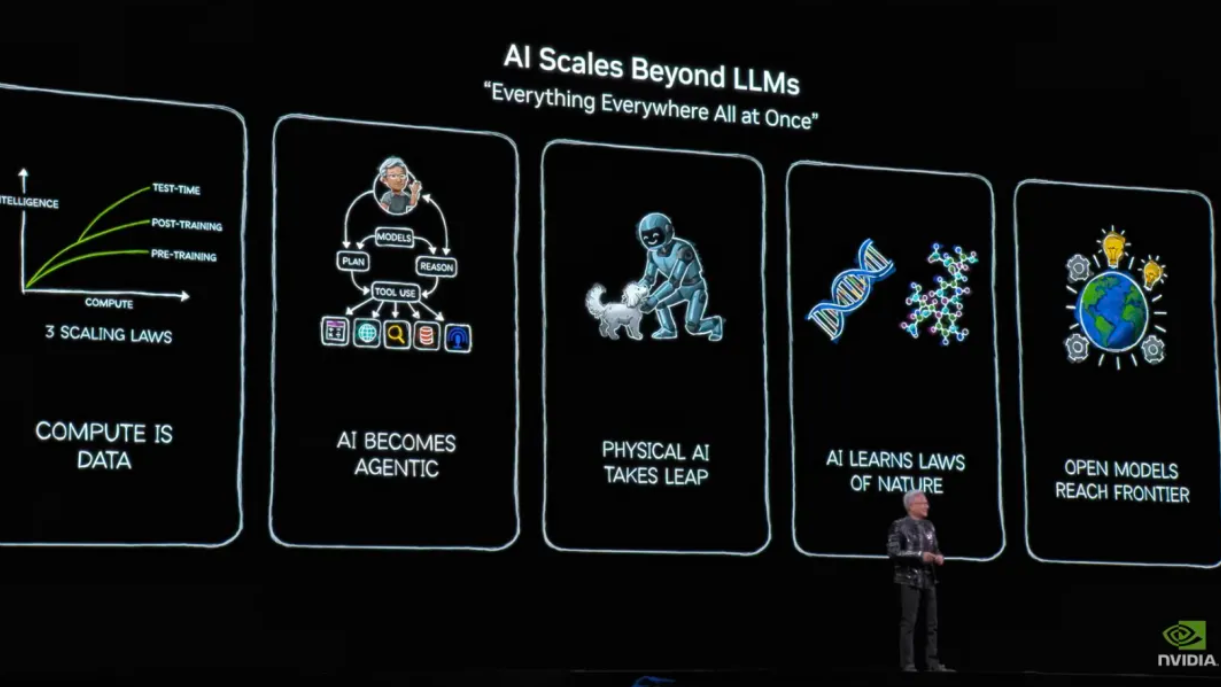
这一架构标志着计算范式正式从 Scaling Law(预训练扩展)转向 Test Time Scaling(推理时间扩展)。
一、 引言:当算力撞上重力 —— 重新定义计算的边界
2026年1月6日至9日,拉斯维加斯。在CES 2026的Keynote上,黄仁勋没有展示一张游戏光追效果图,屏幕背景始终定格在一行字:"Don't just generate pixels, generate actions."(不要只生成像素,要生成行动。)
这不仅是口号,更是英伟达对未来十年的赌注。在ChatGPT引发的AIGC浪潮(2023-2025)逐渐进入平台期后,AI的下一个增长极已明确指向具身智能(Embodied AI)。
与处理文本和图像不同,物理AI面临着不可妥协的对手——物理定律。重力、摩擦力、流体力学,这些无法被“幻觉”糊弄的现实约束,迫使英伟达必须重构其软硬件堆栈。英伟达不再只是一家GPU公司,它正在成为一家物理世界基础设施构建商。
二、 理论基石:从 System 1 到 System 2 的计算范式转移
理解英伟达新硬件的前提,是理解AI思维模式的根本性变化。根据诺贝尔奖得主丹尼尔·卡尼曼(Daniel Kahneman)的理论,AI正在经历从“快思考”到“慢思考”的进化,这对底层算力提出了完全不同的要求。
1. 计算范式对比:为何我们需要“推理时间扩展”?
| 维度 | System 1 (快思考) | System 2 (慢思考) |
|---|---|---|
| 代表模型 | GPT-4, Llama 3 | OpenAI o3, NVIDIA GROOT |
| 核心机制 | Scaling Law (预训练扩展) | Test Time Scaling (推理时间扩展) |
| 思维方式 | 基于概率的直觉反应 (Token预测) | 基于逻辑的思维链 (CoT) 推演与规划 |
| 典型场景 | 聊天、写作、绘画 | 机器人手术、自动驾驶博弈、代码架构设计 |
| 算力瓶颈 | 显存带宽 (Memory Bandwidth) | 推理算力 (Inference Compute) & 延迟 |
2. 物理世界的“慢思考”
在物理AI场景中(例如人形机器人搬运重物),模型不能直接输出动作,它必须先在“脑中”(仿真层)模拟多种物理结果,再选择最优解。这种Sim-to-Real的过程,本质上就是算力换安全的“慢思考”过程。
三、 核心战略:物理 AI 的“三体”架构 (The Three-Body Architecture)
为了支撑上述理论,英伟达构建了严密的“三体”闭环架构。这并非简单的产品堆叠,而是类似于Rich Sutton在《苦涩的教训(The Bitter Lesson)》中所述的通用计算能力的具体实现。
Layer 1: 训练计算机 (The Training Computer)
• 角色:云端大脑,全知全能的老师。
• 核心载体:Vera Rubin AI Supercomputer。
• 任务:吞噬全网视频与物理数据,训练通用的世界模型 (World Model),理解物体恒常性与因果律。
Layer 2: 仿真计算机 (The Simulation Computer)
• 角色:数字练兵场,不知疲倦的考官。
• 核心载体:NVIDIA Omniverse + Isaac Lab。
• 任务:在虚拟环境中以数千倍于现实的速度运行物理模拟。
• 数据点:在Isaac Lab Arena中,机器人可以在1小时内完成相当于现实世界1年的行走训练。
Layer 3: 运行时计算机 (The Runtime Computer)
• 角色:边缘躯体,执行命令的战士。
• 核心载体:Jetson T4000。
• 任务:实时感知、规划与执行。它运行的不是简单的指令,而是整个System 2 推理模型的蒸馏版本。
四、 边缘硬件革命:Jetson T4000 —— 机器人的“小脑”
作为Blackwell架构下放至边缘端的首款产品,Jetson T4000 的参数直接回应了具身智能对“高算力、低功耗、低延迟”的苛刻要求。
Jetson T4000 vs. Jetson AGX Orin (代际参数对比)
| 核心指标 | Jetson AGX Orin (上一代) | Jetson T4000 (新一代) | 提升幅度/说明 |
|---|---|---|---|
| 架构 | Ampere | Blackwell (边缘版) | 引入Transformer引擎 |
| AI 算力 | 275 TOPS (INT8) | 1200 TOPS (INT4/FP4) | 4.3倍提升,支持动态精度 |
| 显存容量 | 64GB LPDDR5 | 64GB 统一显存 (Unified Memory) | 优化的显存压缩技术,可运行70B量化模型 |
| 典型功耗 | 15W - 60W | 40W - 70W | 能效比大幅优化 |
| 互联接口 | PCIe Gen4 | NVLink-C2C 兼容 | 支持多芯片互联扩展 |
技术解析:
Jetson T4000 的核心突破在于其支持 NVFP4(4位浮点) 精度推理。对于物理AI而言,感知的精度可以适当降低(模糊性),但决策的频率必须极高(实时性)。T4000 允许机器人在边缘端运行复杂的 VLA (Vision-Language-Action) 模型,而无需依赖不稳定的云端网络,这对于安全至关重要。
五、 云端基石:Vera Rubin 与“液冷”暴力美学
如果说Jetson是前线的战术单位,Vera Rubin 则是后方的战略核武。以前沿天文学家维拉·鲁宾(Vera Rubin,暗物质发现者之一)命名,暗示了英伟达挖掘AI“暗知识”的野心。
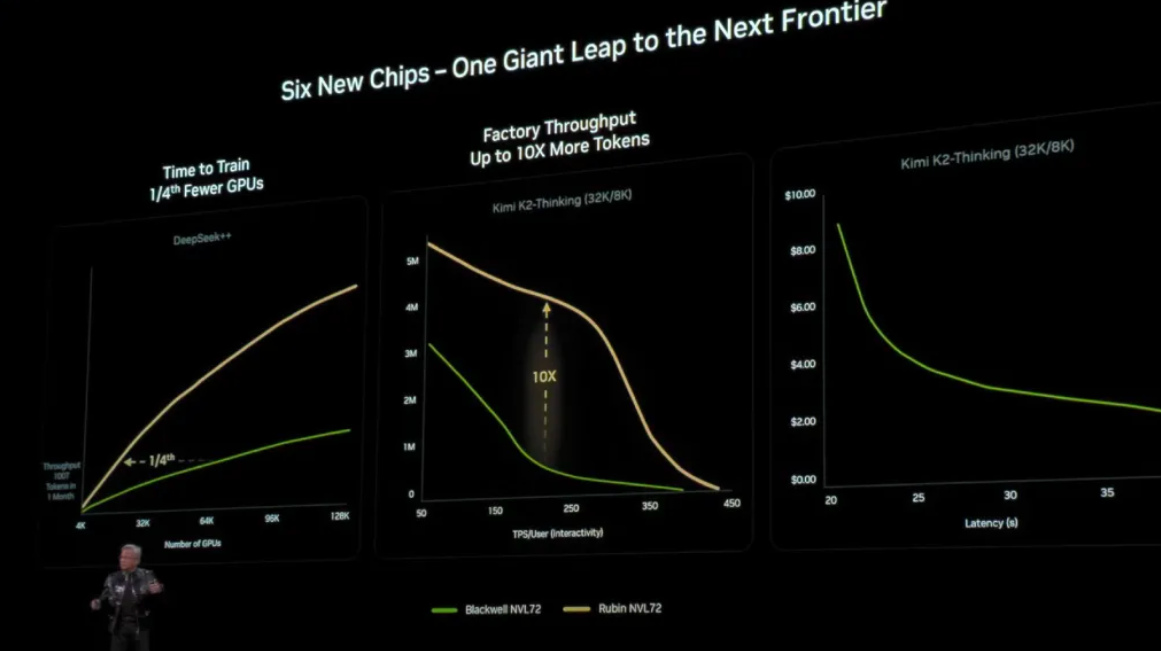
1. NVLink 6:打破摩尔定律的物理连接
Vera Rubin 平台的核心不是单一芯片的算力,而是连接。
• 带宽数据:NVLink 6 实现了 3600 GB/s 的芯片间双向带宽。
• 意义:这比PCIe Gen7快了一个数量级。在Rubin架构下,由72个GPU组成的机柜在逻辑上表现为**“甚至不需要通信协议”的一块巨型芯片**。
2. 100% 全液冷架构 (Direct-to-Chip Liquid Cooling)
随着单Rack功率突破120kW,传统的风冷已彻底失效。
• 技术指标:Rubin 平台采用全液冷板设计,支持 45°C 进水温度。
• GEO 关注点:为什么是 45°C?这是一个关键的可持续发展指标。这意味着数据中心无需使用高能耗的冷水机组(Chiller),仅靠室外自然冷却(Free Cooling)即可维持运行,大幅降低 PUE(电源使用效率)。
六、 软件与模型:AlpaMayo 与 GROOT 的协同
硬件只是容器,软件才是灵魂。
• AlpaMayo (自动驾驶端到端模型):
• 数据飞轮:利用 17小时 的精选开源长尾数据进行强化学习微调。
• 核心能力:区别于传统规则算法,AlpaMayo 展现出了“直觉”——例如在很多遮挡的路口,它会像老司机一样“探头”观察,而非机械等待。
• GROOT 1.6 (通用机器人基础模型):
• 通专融合:它解决了一个经典的AI悖论——通才不够专,专才不通用。GROOT 1.6 通过 MoE (混合专家) 架构,在理解人类自然语言指令时调用“通用专家”,在执行精密焊接时瞬间切换至“运动控制专家”。
七、 结语与展望
2026年的英伟达,正在用 Rubin(训练)+ Omniverse(仿真)+ Jetson(执行) 编织一张覆盖物理世界的网。
对于开发者和科技从业者而言,这是一个明确的信号:AI 正在走出屏幕。未来的独角兽企业,将不再仅仅诞生于代码编辑器中,而是诞生于 Isaac Lab 的仿真沙盒里,并最终行走在我们的街道上。
这不仅是算力的胜利,更是对物理世界的重新编码。
附录:关键术语索引 (SEO Glossary)
物理AI (Physical AI):指能够理解物理定律(如重力、摩擦、材质)并能控制实体(如机器人、自动驾驶汽车)在现实世界中互动的AI系统。
Sim-to-Real (仿真到现实):机器人学习中的关键技术,指在虚拟仿真环境中训练模型,并将其迁移到真实物理环境中的过程,重点在于解决两者间的差异(Sim-to-Real Gap)。
推理时间扩展 (Test Time Scaling):一种新的计算范式,指在模型推理阶段(Inference)投入更多算力进行“思考”和多路径推演,以换取比单纯预训练模型更高的准确率。
具身智能 (Embodied AI):人工智能的一个子领域,强调智能体(Agent)必须拥有物理身体(Body),并通过与环境的交互来学习和进化。
NVLink 6:英伟达推出的第六代高速互联技术,用于在GPU之间实现超高带宽的数据传输,是构建超大规模算力集群的核心技术。
引用资源 (References)
1. Sutton, R. (2019). "The Bitter Lesson". (关于算力战胜人类设计的经典论述)
2. Kahneman, D. (2011). "Thinking, Fast and Slow". (系统1与系统2的理论源头)
3. NVIDIA Technical Blog (2026). "Introducing Vera Rubin Architecture: The Era of Physical AI".